Skills: ROS, Motion Planning, MoveIt, Inverse Kinematics, Computer Vision, Git Usage
Overview
The goal of this project was to program a Rethink Sawyer robot to play mini-golf. Given a game space mimicking a putting green, the robot recognizes the ball and the hole, and moves itself into a striking position behind the ball. Then, it actuates its joints to perform a putting motion and hit the ball into the hole.
This project is our final project of ME495: Embedded Systems in Robotics (ROS), Dec. 2019. The theme is recreational robotics.
Demo
Contents
My Contribution
- Configured MoveIt to work with sawyer; Modified moveit_sawyer package for the specific use of this project.
- Completed position and angle calculation using the position of the ball and hole obtained from the CV node.
- Implemented collision avoidance.
- Enhanced the capability to reliably find solutions with inverse kinematics and obstacle avoidance motion planning.
Project Description
A ROS package (Link to the repository) was created using rospy client library. OpenCV is used for the computer vision node. Motion planing module makes use of the MoveIt library, and Gazebo is used for simulation.
Nodes
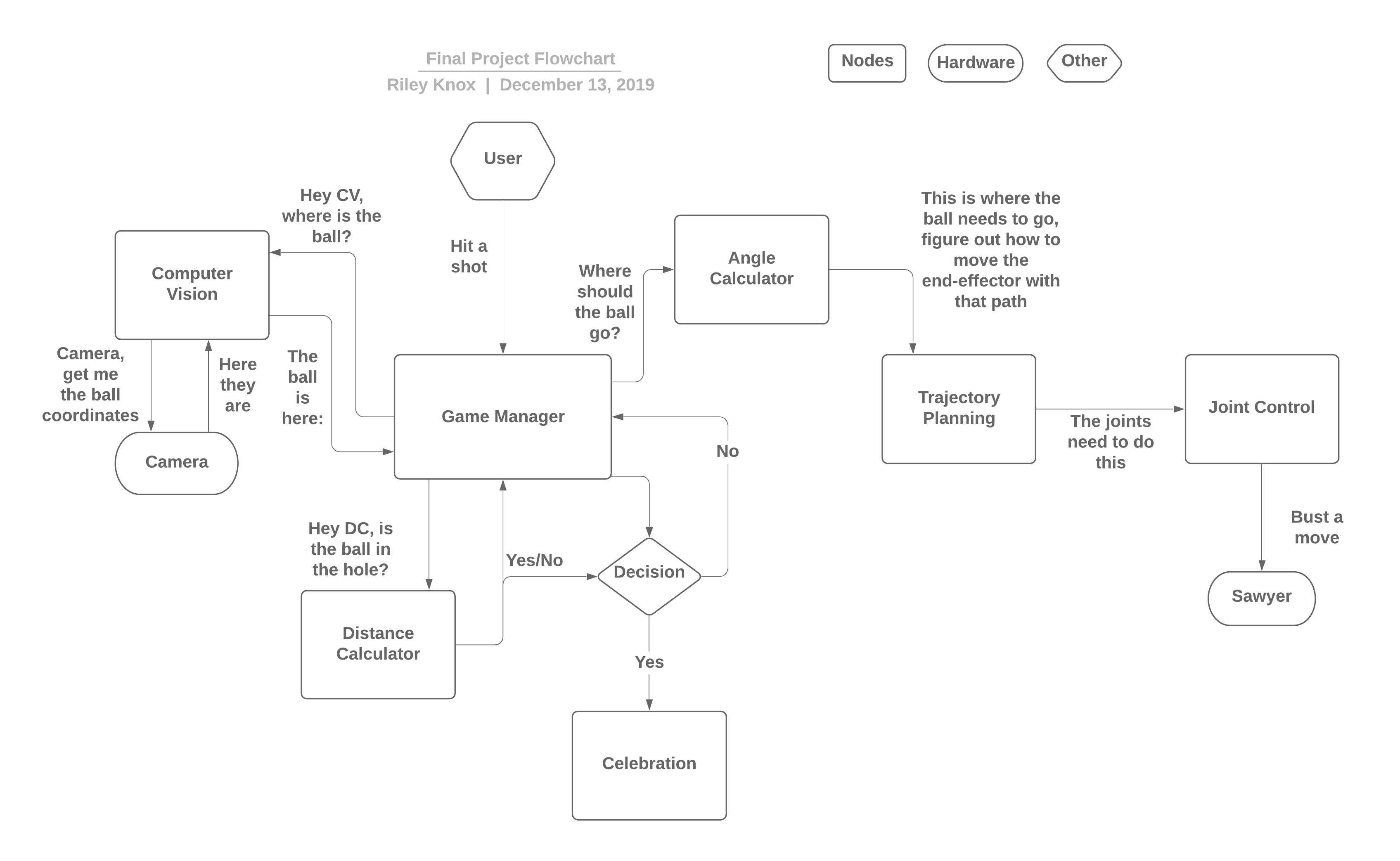
This project is designed as an interaction of five nodes:
cv_detect_ball: computer vision; visualizes the game space and finds the ball & holemove_group_python_interface: trajectory planning; determines the end-effector motion necessary to- a) move the putter behind the ball and
- b) hit the ball towards the hole
hit_ball: actuation; plans and sends commands to the joints to move the robot per the planned trajectorygame_planner: integrator node; brings information from the other four nodes together to achieve the taskcamera_cal2: calibrates the camera space to the physical game space
The program generally follows the structure of the flowchart shown here:
Node Descriptions
Computer Vision
- Objective
- Design and program a Sawyer camera interface that accurately recognizes the game space, including the ball, hole, and the game area itself, and to package and distribute that information in a way that allows other program components to successfully interact with the game space.
- Successes
- The camera consistently and effectively identified the ball and the game space using color-based image segmentation.
- The computer vision node converts the pixel locations of the ball to geometric coordinates based off a set of physical calibration parameters.
- Failures
- We ended up using an external camera to identify the game area, as the Sawyer camera was not sufficient for our needs. Color detection was not ideal and the camera was somewhat fish-eyed, which would have negatively impacted our calculations of distance/angle to the ball and hole.
- We would have liked to perform camera calibration automatically, rather than having to physically move the ball around and calibrate our game space based on those measurements; however, automatic calibration proved inconsistent.
- Future Improvements
- Work on automatic camera calibration.
Mapping Frames
- Objective
- Provide setup calibration procedure for translating overhead camera picture coordinates to real world Sawyer frame coordinates.
- Provide a service to the game planner that could convert overhead camera picture coordinates to real world Sawyer frame coordinates.
- Successes
- Established a calibration system and position translation service.
- Failures
- Resolution of service was ~4cm in addition to calibration being a rather long process, taking ~15 minutes.
- Future Improvements
- Successfully implement solvePnP mapping with OpenCV and the provided checkerboard, then using homography to map between the overhead camera frame and Sawyer frame.
- Using April tags such that the overhead frame and Sawyer could locate themselves in space using the transforms provided by perceiving the April tags. This is likely the optimal approach.
Moving Behind Ball
- Objective
- Move the putter behind the ball to prepare for hitting. The putter should be positioned behind the ball, collinear with the ball and hole, and facing towards the hole.
- Obstacle avoidance: the putter should not collide with the table, ball, or robot.
- Successes
- Configured MoveIt to work with sawyer; forked moveit_sawyer package for the specific use of this project, and modified joint velocity limits and scaling according to our requirements.
- Completed position and angle calculation using the position of the ball and hole obtained from the CV node.
- Implemented collision avoidance by adding the table, putter, and ball to the motion planning scene. Removed the self-collision check between the putter and the gripper.
- Enhanced the capability to reliably find solutions with inverse kinematics and obstacle avoidance motion planning by requesting the numerical solution multiple times.
- Failures
- Attempted to align Joint 5 with the hitting direction by adding an extra constraint to the motion planner. It turns out that with seven constraints (including six components of the requested pose) and joint limits of the robot, a solution cannot always be found.
- Future Improvements
- The distance behind the ball can be automatically calculated according to the distance between the ball and hole.
Hitting Ball
- Objective
- Hit the ball towards the hole using a motion similar to an actual golf swing.
- Align the putter with the direction to the hole right before hitting the ball.
- Use MoveIt to accomplish this task.
- Successes
- Based on the ball's location, completed the putting motion to hit it to the hole successfully.
- Made the putting motion similar to a real golf swing.
- Returned to the home location after each swing to wait for the next shot.
- Failures
- Attempted to use velocity control to hit the ball. Our first attempts at velocity control resulted in pushing the ball along the line to the hole, rather than a swing that contacts the ball at a single time point.
- Did not always successfully align the putter in the same direction as the hole right before the hit, causing the ball to not move directly towards the hole.
- Future Improvements
- Velocity control can be implemented to see if it is possible to hit the ball without checking which area the ball is in.
- The putter can be aligned perfectly right before the hit.